
Weitere Informationen WinMOD Special Intralogistik (PDF)
Palettenfördertechnik Palettierer
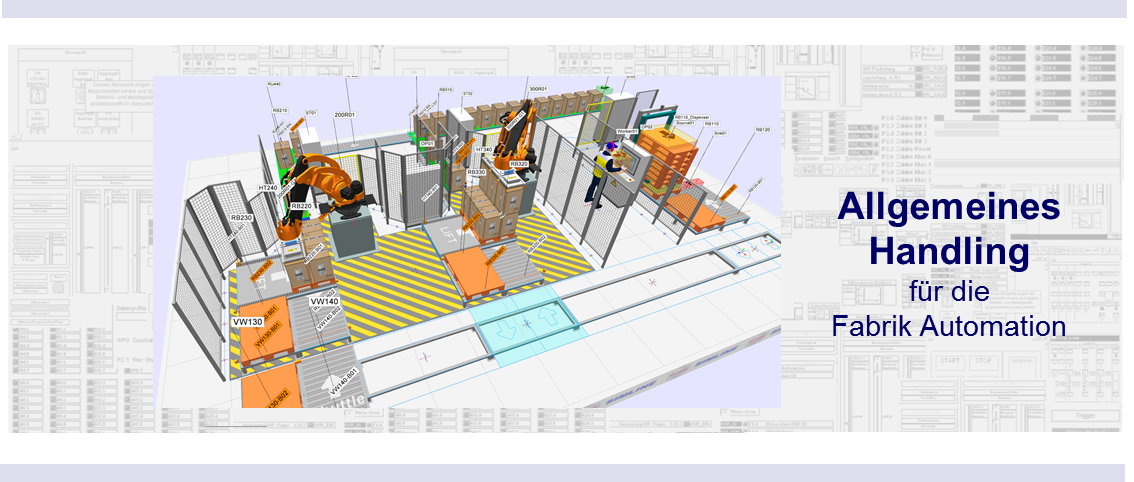
Die WinMOD-SIMLINE Roboter-Bibliotheken für ABB, KUKA und FANUC enthalten viele verschiedene Robotermodelle, entsprechend der realen Vorbilder. Die 6-Achs-Knickarm Roboter bilden dabei die Basis, aber auch Palettierer mit Ausgleichsmechanik oder Kleinroboter für Pick-and-Place von Kleinteilen stehen zur Verfügung. Die Greif- und Handlings-Vorrichtungen am Roboterkopf können wieder durch parametrierbare Elemente aus der WinMOD-SIMLINE Bibliothek Roboterumfeld (ROB) realisiert werden.
Ein Anreichern der Vorrichtungen mit den individuellen 3D CAD-Daten ist jederzeit möglich. Die Stückguterfassung erfolgt wieder mit den WinMOD-SIMLINE Sensoren.